Semillero de investigación Open-Creator construye Robots con aplicación en diferentes áreas
 En semillero de investigación en Procesamiento de Imágenes (OpenCreator) del programa de Ingeniería Mecatrónica, adscrito al Grupo de Investigación InnovaTIC, desarrolló un robot tipo araña denominado X-CABOT
En semillero de investigación en Procesamiento de Imágenes (OpenCreator) del programa de Ingeniería Mecatrónica, adscrito al Grupo de Investigación InnovaTIC, desarrolló un robot tipo araña denominado X-CABOT ![]() , que cuenta con la más avanzada tecnología de desplazamiento terrestre, variedad de sensores esenciales para el estudio y caracterización de su entorno, es fácil de usar, seguro y resistente; su diseño innovador le permite acceder a terrenos de difícil acceso, está concebido para contribuir en procesos de investigación dentro de cavernas, adicionalmente, es un robot teledirigido, teniendo la capacidad de obtener muestras para estudios futuros en el sector de la espeleología, entre otros. Con esta tecnología el semillero ha participado en diferentes programas de maduración tecnológica y comercial, ha sido acreedor a reconocimiento en ponencias internacionales y se han realizado divulgaciones académicas y científicas. Este proyecto fue realizado por los estudiantes Natalia Sánchez y Brayan Contreras del programa de Ingeniería Mecatrónica, bajo la orientación del investigador Marco Antonio Jinete y el apoyo del investigador Rubén Darío Hernández.
, que cuenta con la más avanzada tecnología de desplazamiento terrestre, variedad de sensores esenciales para el estudio y caracterización de su entorno, es fácil de usar, seguro y resistente; su diseño innovador le permite acceder a terrenos de difícil acceso, está concebido para contribuir en procesos de investigación dentro de cavernas, adicionalmente, es un robot teledirigido, teniendo la capacidad de obtener muestras para estudios futuros en el sector de la espeleología, entre otros. Con esta tecnología el semillero ha participado en diferentes programas de maduración tecnológica y comercial, ha sido acreedor a reconocimiento en ponencias internacionales y se han realizado divulgaciones académicas y científicas. Este proyecto fue realizado por los estudiantes Natalia Sánchez y Brayan Contreras del programa de Ingeniería Mecatrónica, bajo la orientación del investigador Marco Antonio Jinete y el apoyo del investigador Rubén Darío Hernández.
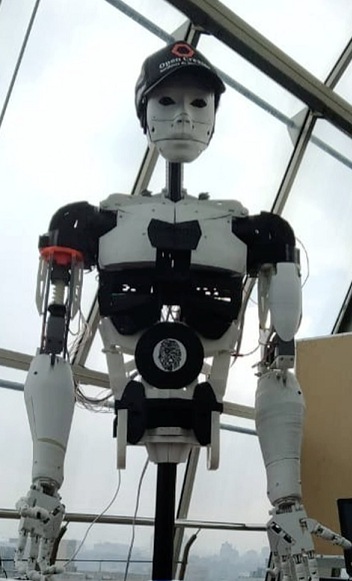
Con la expectativa de continuar impactando el campo de la Mecatrónica el semillero continúa trabajando en el diseño robots terrestres de locomoción hibrida con múltiples aplicaciones; robot humanoide, drones para aplicación en procesos relacionados con accidentes de tránsito; robot interactivo, que a través de un video juego enseñe el correcto reciclaje de los residuos, entre otros.
Para más información contactar al docente Marco Antonio Jinete, correo electrónico marco-jinete@upc.edu.co